

수직이착륙과 고속비행이 가능한 고속-수직 이착륙 무인기인 스마트 무인기는 이륙 시 로터가 헬리콥터처럼 수직 방향으로 위치해 있다가 전진 비행 시에는 로터를 다시 수평으로 바꿔 속도를 높이는 항공기로, 고정익기와 헬리콥터의 장점을 결합한 것이 특징이며 헬리콥터에 비해 속도와 고도 모두 2배의 성능으로 장거리 비행이 가능하다. 2002년부터 10년에 걸쳐 개발에 성공했으며 이는 미국에 이어 세계 두 번째이다.

마트무인기 개발사업은 2002년 정부가 추진한 23개의 21세기 프론티어 기술개발 사업으로 선정되어 시작했고 2012년 까지 10년간 약 970억 원의 예산을 투입해 성공적으로 기술 개발을 완료했다. 한국항공우주연구원이 주관해 한국항공우주산업(주), LIG넥스원, 퍼스텍 등 10개 기업과 19개 대학 등 총 36개 기관이 공동으로 진행했다.
우리나라가 2002년 스마트무인기 개발사업을 착수했을 때 미국 벨 헬리콥터사는 유인 틸트로터 항공기 기술을 적용해 이글아이(Eagle Eye)라는 무인 틸트로터 기술시연 항공기를 개발하고 있었다. 틸트로터 항공기는 미국에서 유인 항공기로 1950년대부터 3종의 시범용 항공기를 개발한 것을 시작으로 꾸준히 기술적 난관을 극복하며 2005년에야 양산에 착수할 정도로 고난이도의 항공기로 벨 사가 미국 해안경비대(Coast Guard)의 주문을 받아 함정 탑재용 무인기를 개발 시 2006년 비행시험 중 추락해 어려움을 겪고 사업을 중단했다. 틸트로터 항공기 기술개발의 난이도를 실감할 수 있는 사건이었다.

무인기는 유인기에서 조종을 담당하는 조종사 역할을 비행제어 컴퓨터가 담당한다. 따라서 목표지점까지 자세를 유지하며 안전한 비행을 하기 위해 비행제어 소프트웨어의 역할이 매우 중요하다. 무엇보다 비행제어 소프트웨어는 각 나라마다 해외 유출을 법으로 금지하고 있어 기술도입이 원천적으로 불가하다. 항공기 외형설계시 전산유체해석이나 풍동시험을 통해 획득한 자료를 토대로 비행시험을 반복하며 개선해야 안전을 보장하는 비행제어 소프트웨어가 완성된다.
미국에서는 'V-22 오스프리'라는 유인 틸트로터 항공기를 개발하는 동안 4회의 추락사고가 있었고 30여명의 인명피해가 발생했다. 우리나라에서도 비행시험 중 수 차례 추락사고가 있었으나 비행제어 소프트웨어 검증을 위한 축소형 무인기 비행으로 인명피해가 없었고 경제적인 손실도 최소화할 수 있었다. 2011년 헬리콥터 모드에서 비행기 모드로 변신하는 천이비행에 성공해 마침내 스마트 무인기 개발을 입증하며 세계에서 두 번째로 틸트로터 항공기 기술을 획득하게 되었다.

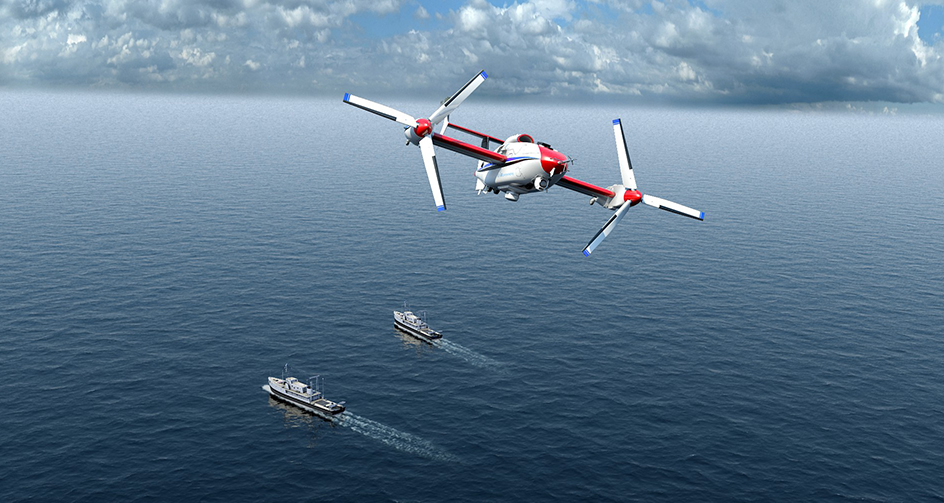
스마트 무인기는 비행체, 통신, 관제 및 지상 지원 장비로 구성되어 있다. 비행체에는 임무장비로 주야간 감시 카메라가 탑재되어 있고, 주요 항공전자 장비로는 비행제어 컴퓨터와 항법장비가 탑재되어 있다. 지상 관제장비를 통해 200km 반경 내 특정 지역으로 감시 정찰 비행을 명령하면 탑재된 컴퓨터가 항법장치와 연계해 자동으로 계획된 지점을 비행하며 임무를 수행하도록 조종한다. 비행체에 탑재된 주야간 감시 카메라는 3km의 고도에서 목표물의 영상을 촬영하고 통신장치는 정보를 실시간으로 지상에 전송하며 지상에서는 이러한 영상을 수신해 재난 지역이나 적진의 상황을 파악한다.

기술 시연기로 개발한 스마트무인기(TR-100)의 대표적 성능은 최대속도 500km/h, 임무반경 200km, 최대체공시간 5시간, 유상하중 90kg이다. 엔진은 550마력의 터보샤프트를 사용하고 있다. 이후 최대속도 조건을 완화하고 경량화한 고성능 소형 감지기를 장착할 경우 동급 고정익 무인기와 무인 헬리콥터에 비해 우수한 성능을 가진 틸트로터를 개발할 수 있음을 알게 되었다.
이에 한국항공우주연구원은 2008년부터 2011년까지 비행체 총중량 200kg급으로 체공시간 5시간, 최고속도 250km/h, 임무반경 60km, 유상하준 20kg급으로 체공시간 5시간, 최고속도 250km/h, 임무반경 60km, 유상하중 20kg의 성능을 목표로 고성능 저중량 저비용의 실용 틸트로터무인기 TR-60 시연기를 자체 과제로 개발했다. TR-60은 헬리콥터보다 높은 고도에서 훨씬 빠른 속도로 비행할 수 있어 보다 효율적으로 넓은 지역의 감시·수색·정찰·운송·통신·중계 등의 용도로 활용이 가능하다.

이후 자동이착륙과 천이비행을 성공해 2011년 8월 (주)대한항공과 기술이전 및 공동개발 협약을 맺고 TR-60급 틸트로터를 2년간 공동 개발했다. TR-60급 수직이착륙 무인기는 국내 수요를 파악해 공공용 실용화 개발 사업을 추진하고 있으며 군수용 수직이착륙 무인기 개발 사업도 진행하고 있다.
스마트 무인기는 산악지형과 삼면이 바다로 둘러싸여 활주로를 확보하기 어려운 국내 환경에 적합하고 적지 정찰 등의 군사적 이용은 물론 해안 및 도서 정찰, 산불 및 교통 감시, 기상 관측 등의 다양한 분야에서 활용할 수 있다. 또한 수직이착륙과 고속비행이 가능해 우리나라와 같이 활주로가 부족한 환경에서 개인용 항공기(PAV)로의 활용 잠재력이 매우 크다.
| 구분 | TR-100 | TR-60 |
|---|---|---|
| 전장 (m) | 5 | 3 |
| 최대이륙중량 (kg) | 995 | 200 |
| 유상하중 (kg) | 90 | 20 |
| 최대속도 (km/h) | 500 | 240 |
| 비행시간 (hours) | 5 | 5 |
| 운용반경 (km) | 200 | 50 |





출처 : 항우연