

미래형 개인항공기(PAV, Personal Air Vehicle) 시장에 대비하기 위해 이미 확보한 틸트로터 기술을 바탕으로 로터가 4개 달린 쿼드틸트프롭 무인기(QTP-UAV)를 개발했다.

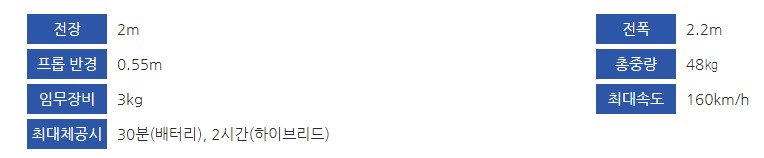
쿼드틸트프롭 무인기(QTP-UAV)는 수직이착륙과 고속비행이 가능한 전환형 비행체로, 1개의 전기배터리와 4개의 전기모터 및 프롭으로 구성된 분산전기추진 방식의 무인기이다. 전기 배터리가 여러 개의 모터에 동력을 공급하기 때문에 시스템이 단순하고 4개 로터의 회전수 제어를 통해 비행 안정성을 높일 수 있다. 비행체의 기본 요구조건은 총중량 48kg, 임무중량 3kg, 최대속도 150km/h 이상이다. 최대 체공시간은 배터리 동력 30분, 엔진-발전기-배터리로 구성된 하이브리드 추진의 경우 2시간이다.
쿼드틸트프롭 무인기(QTP-UAV)는 이착륙 시 4개의 로터가 헬리콥터처럼 수직 방향으로 위치해 있다가 이륙 후 비행 시에는 일반 고정익 항공기처럼 동체와 수평을 이루기 때문에 고속비행이 가능하다. 쿼드틸트프롭 무인기(QTP-UAV) 개발 시 중요한 핵심기술은 여러 개의 로터를 동시에 제어해 이착륙과 비행 시 비행체 자세를 안정적으로 유지하는 자세제어 기술과 전기 배터리에서 여러 개의 파워 라인을 통해 각 모터에 전력을 고르게 보내는 전력제어 기술이다.
쿼드틸트프롭 무인기(QTP-UAV)는 2016년부터 2018년까지 3년간 주요사업을 통해 개발했다. 체계종합에서는 무인기 시스템을 설계하고, 비행체 사이징, 성능해석, 형상설계, 프롭 및 틸트 계통에 대한 하중해석과 체계통합 지상 및 비행시험을 수행했다. 추진분야에서는 엔진, 발전기, 배터리로 구성된 하이브리드 시스템을 개발했다. 제어분야에서는 비행제어시스템과 지상관제장치(GCS)를 개발했다. 구조분야에서는 비행체의 구조하중해석과 구조설계를, 공력분야에서는 비행체의 전산유동해석 및 풍동 시험을, 회전익분야에서는 프롭의 설계 및 해석을 진행했다.
쿼드틸트프롭 무인기(QTP-UAV) 시스템은 비행체와 지상관제 및 통신장비로 구성되어 있다. 비행체에는 두 개의 UHF 주파수의 통신장비와 센서 일체형 통합 비행제어컴퓨터(FCC)를 장착했다. QTP-UAV는 배터리 버전 2대, 풍동모델 1대 등 3대를 제작했다. 풍동모델은 시험 완료 후 하이브리드 버전으로 개조할 수 있도록 했다.
쿼드틸트프롭 무인기(QTP-UAV) 풍동시험은 한국항공우주연구원 중형아음속 풍동에서 수행되었으며 이후 비행시험은 고흥항공센터에서 진행했다. 안전줄을 뗀 최초의 회전익 비행은 2018년 9월 11일에 있었다. 비행시험은 호버 비행을 시작으로 활주로 상공 저고도 회전익 모드 시험, 외부 조종사의 수동비행과 내부조종사의 유지모드, 그리고 최종적으로 자동비행 순으로 진행했다. 회전익모드 비행이 완료된 후 천이 비행은 고도 100~200m, 반경 500~600m의 점항법 비행을 통해 점진적으로 이루어졌다. 2018년 9월 18일에는 점항법 모드에서 단계적인 증속을 통해 틸트 0도, 비행속도 145km/h까지의 천이비행을 성공했다. 2018년 10월 25일 비행에서는 비행특성을 향상시키기 위한 제어로직 및 이득 조정을 거쳐 최대 속도 165km/h까지 도달했다.
쿼드틸트프롭 무인기(QTP-UAV) 개발은 쿼드틸트프롭 비행체에 대한 특성과 관련 비행제어기술을 확보하는 성과를 거두었다. 본 과제를 통해 총중량 50kg급의 고속-수직이착륙 무인기 시스템 기술을 확보했다. 또한 분산 추진형 전기추진 수직이착륙 항공기에 대한 원천기술 확보로 차기 전기추진 수직이착륙 개인용 항공기 사업에 적극 활용할 계획이다.
 틸트덕트 무인기, 프로펠러에 덕트(duct)를 씌운 무인기로, 덕트...
틸트덕트 무인기, 프로펠러에 덕트(duct)를 씌운 무인기로, 덕트...